Работу двигательного аппарата человека обычно излагают с позиций общих законов механики, вполне применимых для оценки системы опорно-двигательного аппарата как системы рычагов. Рычагом называется всякое твердое тело, способное совершать вращательные движения около оси, на плечи которого действуют две противоположные силы: движущая сила (мышечные сокращения) и сила сопротивления.
Работу двигательного аппарата человека обычно излагают с позиций общих законов механики, вполне применимых для оценки системы опорно-двигательного аппарата как системы рычагов. Рычагом называется всякое твердое тело, способное совершать вращательные движения около оси, на плечи которого действуют две противоположные силы: движущая сила (мышечные сокращения) и сила сопротивления.
В зависимости от величины движущей силы и силы сопротивления возможно равновесие или движение рычага. Для понимания равновесия или движения рычага необходимо иметь определенное представление о плече рычага и о моменте вращения силы.
Плечом рычага называют расстояние оси вращения (О) до точки приложения силы (ОА и ОБ). Плечом силы называют кратчайшее расстояние - перпендикуляр от оси вращения до вектора силы или его продолжения (OA1 и OБ1).
Участие каждой мышцы в выполнении движений зависит не только от величины подъемной силы, но также и от величины плеча рычага, что определяется моментом силы. Моментом силы называется произведение силы на ее плечо. Моментом силы FI будет произведение FI·OAI или FI·Sin ОА; моментом силы FII будет FII·OБI, или FII·Sin·OБ.
Таким образом, условие для равновесия рычага достигается тогда, когда сумма моментов сил, действующих на него, относительно оси вращения равна нулю. Если равенство моментов сил нарушается, то рычаг начинает вращаться в направлении той силы, момент которой больше. Момент силы является непостоянной величиной, обусловленной положением одних костей по отношению к другим, образующим данное сочленение.
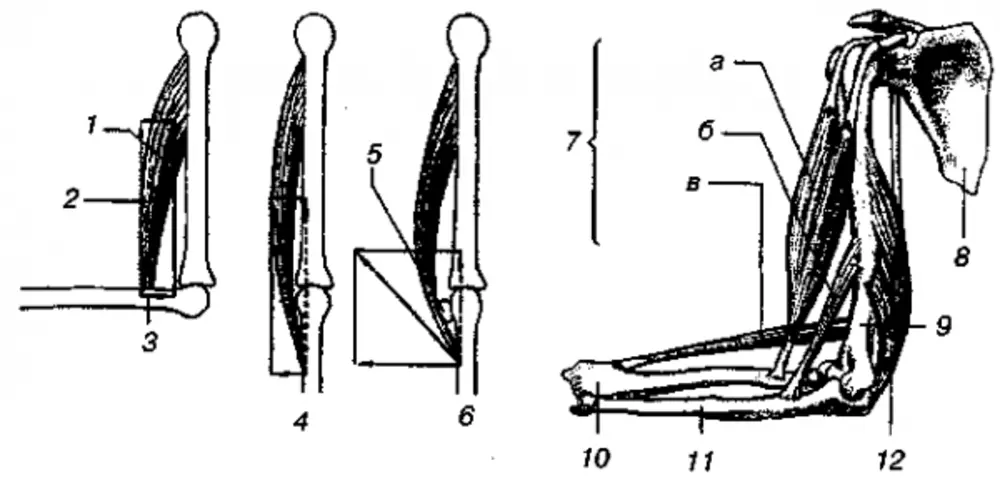
 Поэтому при сгибании в суставе будет нарастать плечо рычага сгибателей и соответственно момент силы, т. е. увеличивается угол подхода сухожилия к мышце, что способствует повышению подъемной силы мышцы. В большей части случаев мышцы прикрепляются вблизи суставов и подходят к костям под острым углом. При этом плечо силы меньше плеча сопротивления; при подобном прикреплении мышцы проигрывают в силе.
Поэтому при сгибании в суставе будет нарастать плечо рычага сгибателей и соответственно момент силы, т. е. увеличивается угол подхода сухожилия к мышце, что способствует повышению подъемной силы мышцы. В большей части случаев мышцы прикрепляются вблизи суставов и подходят к костям под острым углом. При этом плечо силы меньше плеча сопротивления; при подобном прикреплении мышцы проигрывают в силе.
В опорно-двигательной системе имеются образования, способствующие увеличению плеча силы мышц, благодаря чему значительно повышается момент силы. К этим образованиям относятся сесамовидные кости, блоки, костные отростки и бугры, разнообразные выступы и шероховатости. За счет этих образований значительно возрастает момент силы мышц. Следовательно, сила мышцы зависит не только от количества мышечных волокон, но и от плеча рычага.
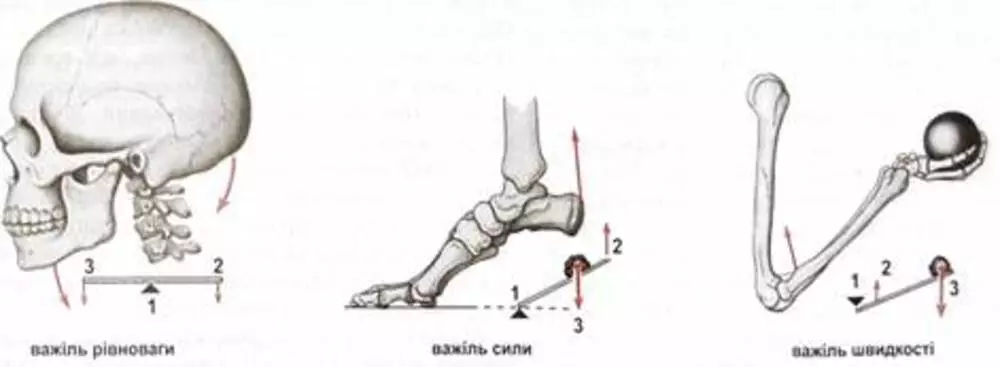
Виды рычагов. В зависимости от расположения движущей силы (мышечное сокращение) и силы сопротивления относительно оси вращения различают рычаги первого, второго и третьего рода.
Рычаг первого рода является двуплечим. Обе силы имеют одинаковое направление, а между ними находится ось вращения данного рычага. Рычаг первого рода называют также рычагом равновесия. Например, атлантозатылочное сочленение и тазобедренный сустав представляют оси вращения рычагов первого рода, по сторонам от которых располагаются плечи рычагов.
 Рычаг второго рода - одноплечий рычаг, так как приложения сил имеют противоположные направления. Движущая сила оказывает действие на длинное плечо рычага, а сила сопротивления - на короткое плечо. Например, в голеностопном суставе одна сила действует вверх, другая - вниз. Давление, которое возникает в оси вращения рычага, соответствует разности действующих сил. Действие мышцы в конструктивной особенности рычага второго рода направлено на выполнение движений, требующих большой мышечной силы, поэтому рычаг второго рода называют также рычагом силы.
Рычаг второго рода - одноплечий рычаг, так как приложения сил имеют противоположные направления. Движущая сила оказывает действие на длинное плечо рычага, а сила сопротивления - на короткое плечо. Например, в голеностопном суставе одна сила действует вверх, другая - вниз. Давление, которое возникает в оси вращения рычага, соответствует разности действующих сил. Действие мышцы в конструктивной особенности рычага второго рода направлено на выполнение движений, требующих большой мышечной силы, поэтому рычаг второго рода называют также рычагом силы.
Рычаг третьего рода хотя и является одноплечим рычагом, но его отличие от рычага второго рода заключается в том, что сила действует на короткое плечо, а плечо сопротивления - на длинное. Рычаг третьего рода можно назвать рычагом скорости. Например, при выполнении сгибания в локтевом суставе длинное плечо силы - предплечье - совершает больший размах движений, чем короткое плечо силы, идущей от лучевой бугристости до локтевого сустава. Таким образом, при действии на короткое плечо мышца выигрывает в скорости и расстоянии и проигрывает в силе.
В процессе построения движений у человека постоянно наблюдаются различные биомеханические особенности в смене, разделении и объединении различных рычагов, что необходимо для выполнения движений с наибольшей экономией энергии.